Author: Dr Kaarthick Balakrishnan
Callback Functions Functionality that is defined by an #AUTOSAR module so that lower-level modules (i.e. lower in the Layered Software Architecture) can provide notification as required (e.g. when certain events occur or asynchronous processing completes).
A module provides callbacks so that other modules can initiate its processing. Callback from the #COM Module triggers the runnables in #ASWC.
Ex: When we receive an event (set temperature) through a CAN BUS then the communication module will provide a notification to the ASWC about the reception of the event through a CALL BACK notification.
Callout Function:
Function stubs that the system designer can replace with code to add functionality to a module which could not be specified by AUTOSAR. A module calls #callouts to execute functionality that could not be specified by AUTOSAR.
AUTOSAR #BSW shall provide callout functions in order to implement certain functionality in integrator code. When a module has to be customized for a particular behavior developer uses callout function callout functions to integrator code.
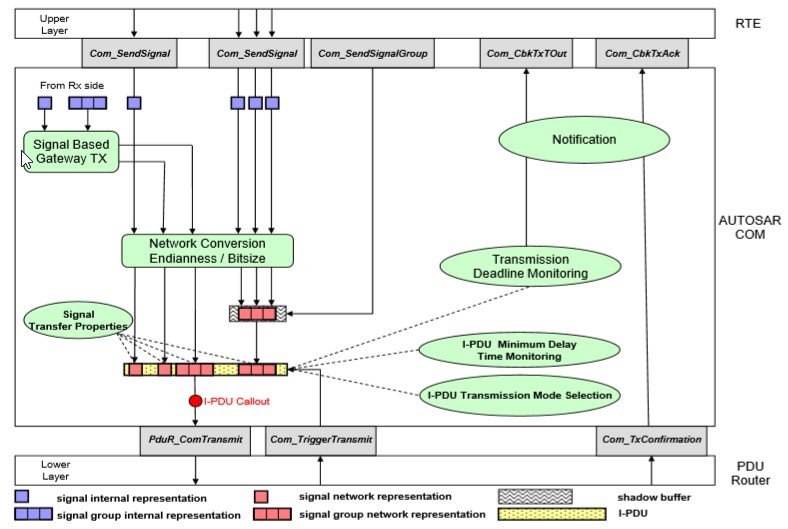
Ex: The module being specified should be informed about an event in another module. In this example, the #IPDUs are all created in the buffer of the communication module. However, the IPDUs can be transmitted to the lower layer (CANIF or CAN TP) when a IPDU callout is received. The developer can decide when the IPDUs can be triggered. This will be implemented with the help of a Callout Function.
Ex: ECUM will provide Callout functions to initialize the modules.